 (+30) 210 6894666
(+30) 210 6894666Ειδικές τεχνικές
Ρομποτικά Συστήματα Νευροχειρουργικής στο ΔΘΚΑ ΥΓΕΙΑ
Εισαγωγή
Ο Τσέχος θεατρικός συγγραφέας Καρλ Τσάπεκ (1890-1938) επινόησε τη λέξη ρομπότ, η οποία ακούστηκε για 1η φορά το 1921, όταν ανέβηκε το θεατρικό του έργο R.U.R. στο Εθνικό Θέατρο της Πράγας. Στο θεατρικό έργο Rossum’s Universal Robots o νεαρός επιστήμονας Rossum επινόησε τα ρομπότ ως εργάτες με ελάχιστες απαιτήσεις απορρίπτοντας κάθε ανθρώπινο χαρακτηριστικό τους και κυρίως χωρίς ψυχή. Στο έργο σατιρίζει την εξάρτηση της κοινωνίας από τους μηχανικούς εργάτες ρομπότ, που τελικά εξοντώνουν τους δημιουργούς τους.
Ο συγγραφέας εμπνεύστηκε τη λέξη από την τσέχικη λέξη “robota”, που σημαίνει καταναγκαστική εργασία και τη λέξη “robotnik” τους σκλάβους που εργάζονται καταναγκαστικά στα χωράφια των αφεντικών τους.
Στη Wikipedia ρομπότ ονομάζονται οποιεσδήποτε μηχανικές συσκευές που μπορούν να υποκαθιστούν τον άνθρωπο σε διάφορες εργασίες. Χρησιμοποιούνται στη βιομηχανία από τη δεκαετία του 1960 σε αυτοματοποιημένες εργασίες αρχικά κυρίως σε αλυσίδες παραγωγής. Η εφαρμογή τους επεκτάθηκε σήμερα σε τομείς όπως κατασκευαστικές εργασίες, αυτοκινητοβιομηχανία, έρευνα και διάσωση, αγροτικές καλλιέργειες, πολεμική βιομηχανία, εξερεύνηση του διαστήματος αλλά και στην ιατρική.
ΡΟΜΠΟΤΙΚΗ ΣΤΕΡΕΟΤΑΚΤΙΚΗ ΒΙΟΨΙΑ ΕΓΚΕΦΑΛΟΥ
Στο νοσοκομείο ΥΓΕΙΑ χρησιμοποιείται από το 2023 το σύστημα STEALTH AUTOGUIDE της εταιρείας MEDTRONIC για τη διενέργεια στερεοτακτικών βιοψιών εγκεφάλου. Πρόκειται περί ρομποτικού συστήματος, το οποίο καταργεί οποιαδήποτε μέχρι τώρα αναγκαία παρέμβαση από το χέρι του χειρουργού για τον ορισμό της κατεύθυνσης της βελόνας βιοψίας. Μέχρι τώρα οι κατευθυντήρες της στερεοτακτικής βελόνας ρυθμίζονταν από τον ίδιο τον χειρουργό ακολουθώντας τις οδηγίες, που προκύπτουν από τον καθορισμό του σημείου λήψης της βιοψίας με υψηλή ακρίβεια αλλά με μεγαλύτερη πιθανότητα απόκλισης σε σύγκριση με το ρομποτικό σύστημα.
Στερεοτακτική βιοψία με την καθοδήγηση ρομποτικού συστήματος πραγματοποιήθηκε για 1η φορά το 1985. Έκτοτε πολλά ρομποτικά συστήματα ακολούθησαν και έχουν χρησιμοποιηθεί για το σκοπό αυτό, όπως τα Neuromate, Rosa, iSYS1 και Renaissance.
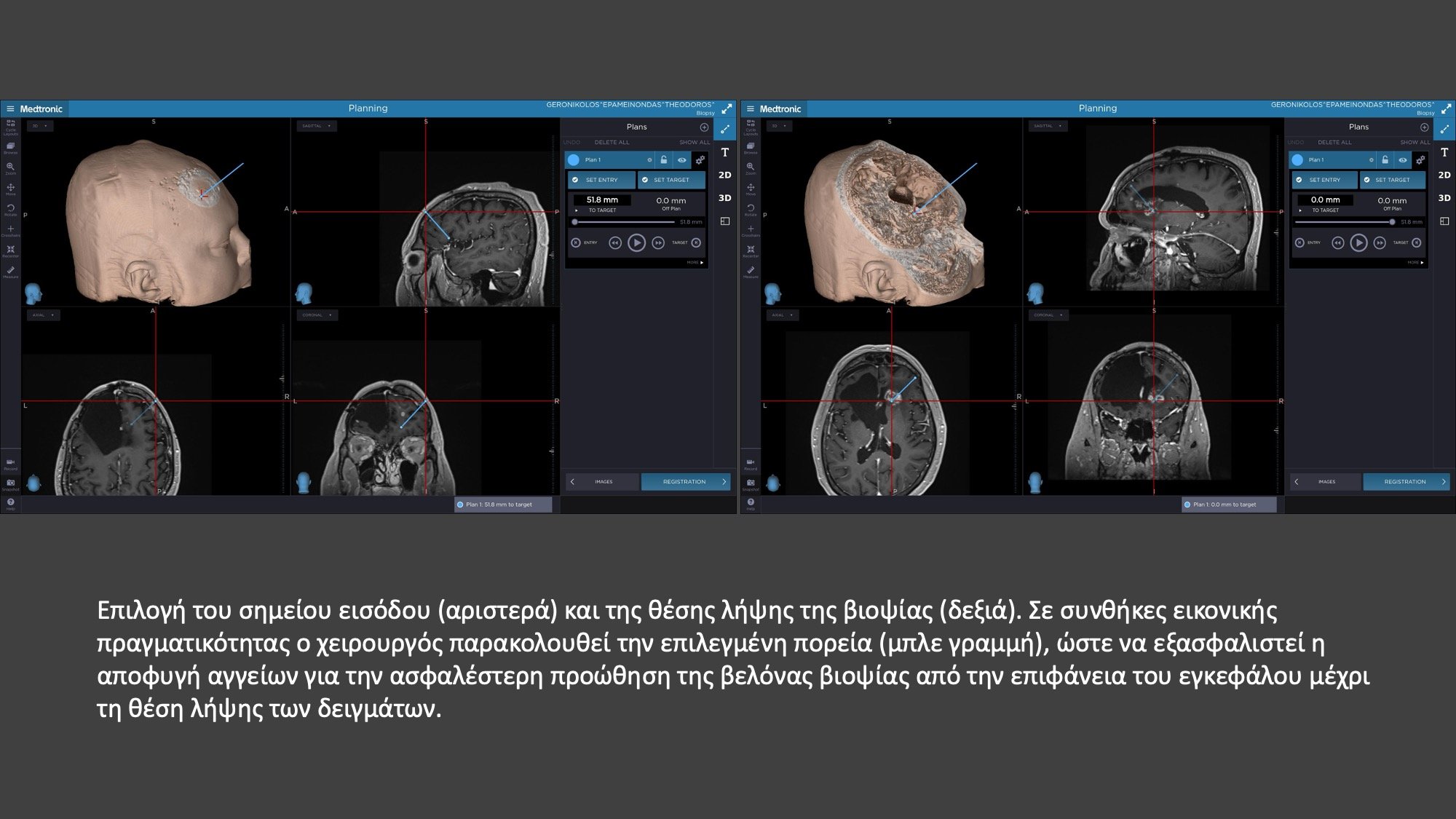
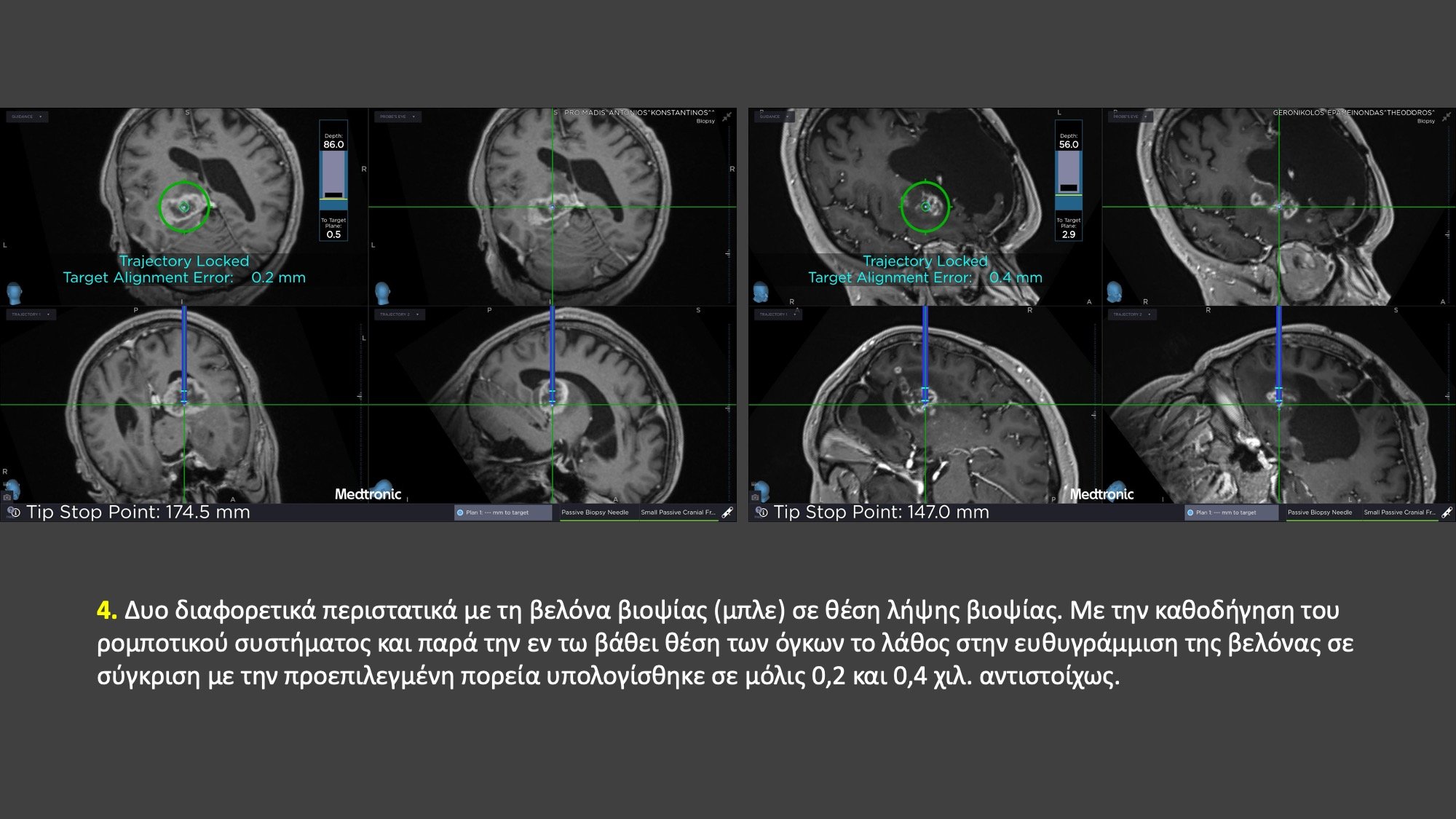
Η χρήση τους βασίζεται στη συνεργασία συστημάτων νευροπλοήγησης, τα οποία παρέχουν τις πληροφορίες των μαγνητικών τομογραφιών και αντιλαμβάνονται τη θέση της κεφαλής στο χώρο. Σημειώνοντας το επιθυμητό σημείο λήψης βιοψίας στην οθόνη του συστήματος, ορίζοντας το σημείο εισόδου (1) και ελέγχοντας την πορεία της βελόνας λήψης της βιοψίας σε συνθήκες εικονικής πραγματικότητας εξασφαλίζεται η αποφυγή ανατομικών δομών, κυρίως αγγείων με σκοπό την αποφυγή επιπλοκών. Στη συνέχεια το ρομποτικό σύστημα ευθυγραμμίζεται αυτόματα στο χώρο μέσω του συστήματος πλοήγησης λίγα εκατοστά πάνω από την επιφάνεια του δέρματος στο προεπιλεγμένο σημείο εισόδου με ακρίβεια <1 χιλ. (2). Από τον αυλό εργασίας του συστήματος και τομή δέρματος 1 εκ. προωθούνται αρχικά ένα τρυπάνι πάχους 3 χιλ. για τη διενέργεια κρανιοανάτρησης, στη συνέχεια ένας στειλεός διάνοιξης της μήνιγγας και στη συνέχεια η βελόνα βιοψίας (3). Η πορεία της ελέγχεται εικονικά στην οθόνη του υπολογιστή, που αναδεικνύει την ακριβή θέση της σε 3 διαστάσεις στο τρισδιάστατο μοντέλο της κεφαλής και του εγκεφάλου, που προκύπτουν από τις ανασυνθέσεις της μαγνητικής τομογραφίας (4). Μετά τη λήψη των βιοψιών και την αφαίρεση της βελόνας βιοψίας ακολουθεί σύγκλιση του τραύματος με 2 ράμματα. Η συνολική διάρκεια του χειρουργείου δεν ξεπερνά τα 20 λεπτά. Ο ασθενής δύναται να λάβει εξιτήριο την ίδια ή την επόμενη ημέρα.


Σε σχέση με προηγούμενα συστήματα λήψης στερεοτακτικών βιοψιών εγκεφάλου το ρομποτικό σύστημα STEALTH AUTOGUIDE έχει τα παρακάτω πλεονεκτήματα:
- Ρομποτικά υποβοηθούμενη ακριβέστατη κίνηση για την ευθυγράμμιση του αυλού εργασίας
- Παρακολούθηση της θέσης των εργαλείων σε πραγματικό χρόνο στην οθόνη του υπολογιστή
- Μικρό μέγεθος ρομπότ, που επιτρέπει την άνετη κίνηση του χειρουργού και βοηθών στο χώρο
- Ταχεία ρύθμιση και κάλυψη με αποστειρωμένες θήκες του συστήματος
ΡΟΜΠΟΤΙΚΗ ΣΠΟΝΔΥΛΟΔΕΣΙΑ
Στο νοσοκομείο ΥΓΕΙΑ χρησιμοποιείται από το 2022 ρομποτικό σύστημα συνδυαστικά με σύστημα διεγχειρητικής απεικόνισης O-ARM 2 για την ασφαλέστερη και αποτελεσματικότερη χειρουργική σπονδυλικής στήλης με ελάχιστα επεμβατικές τεχνικές.
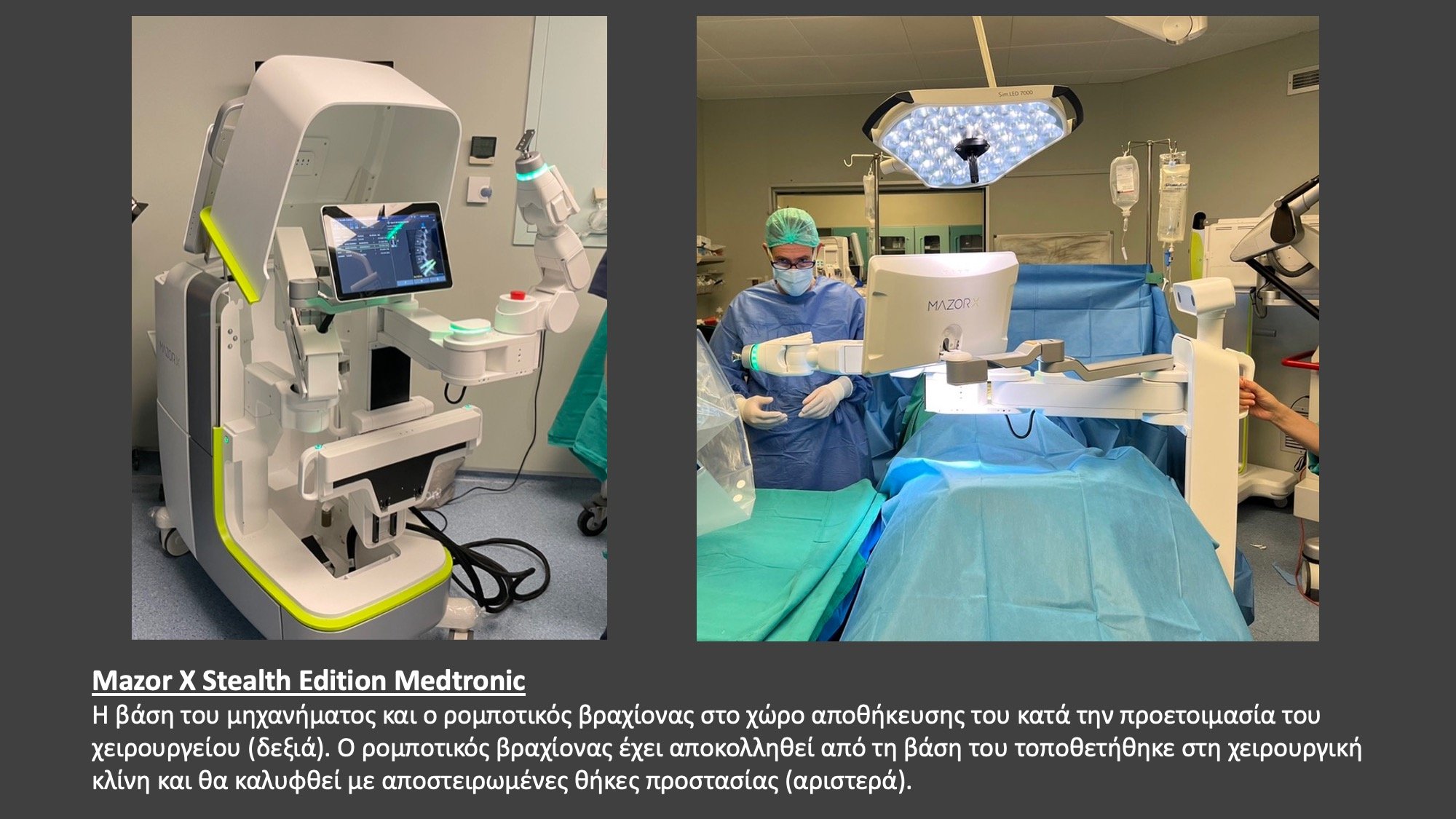
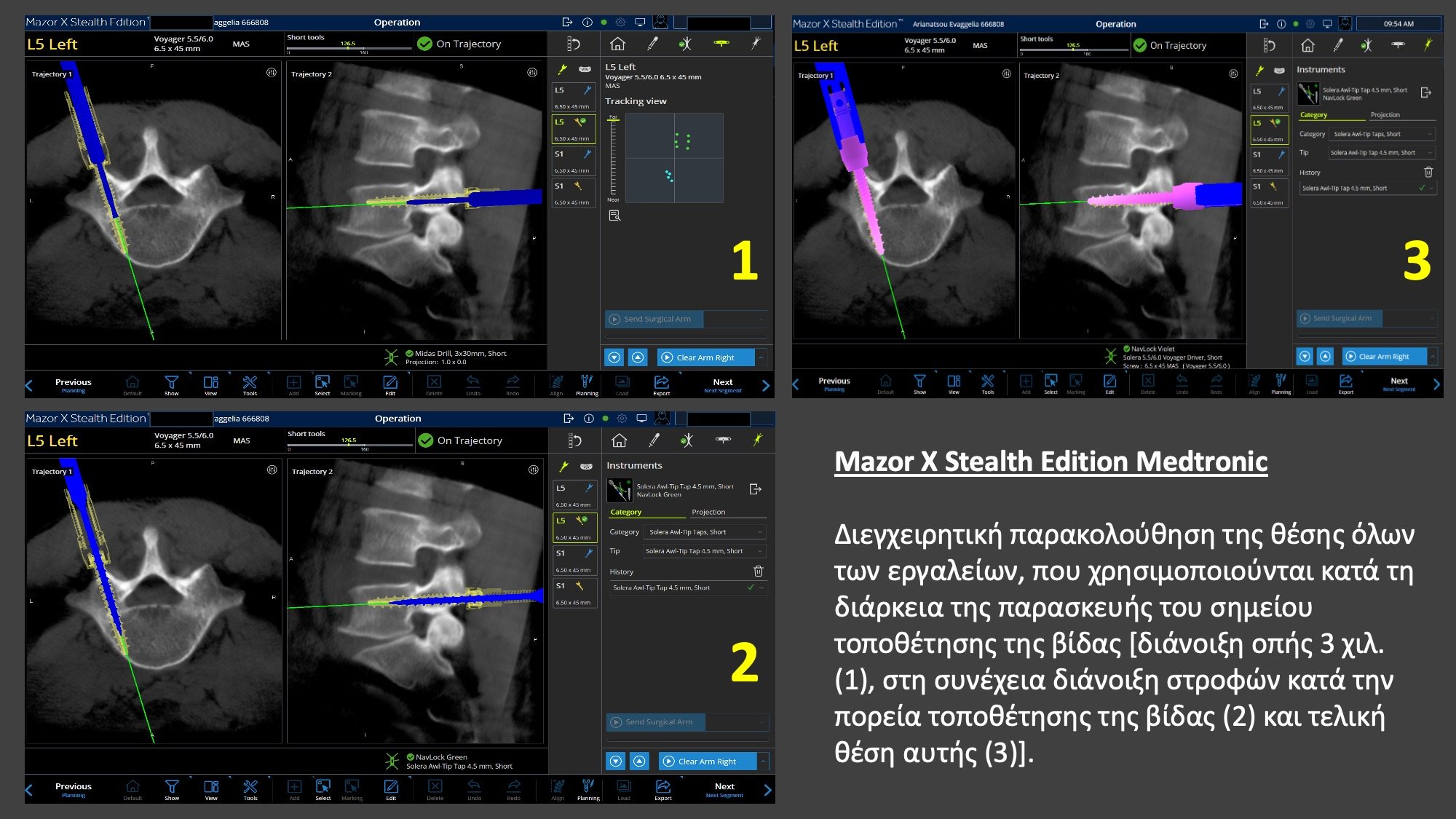
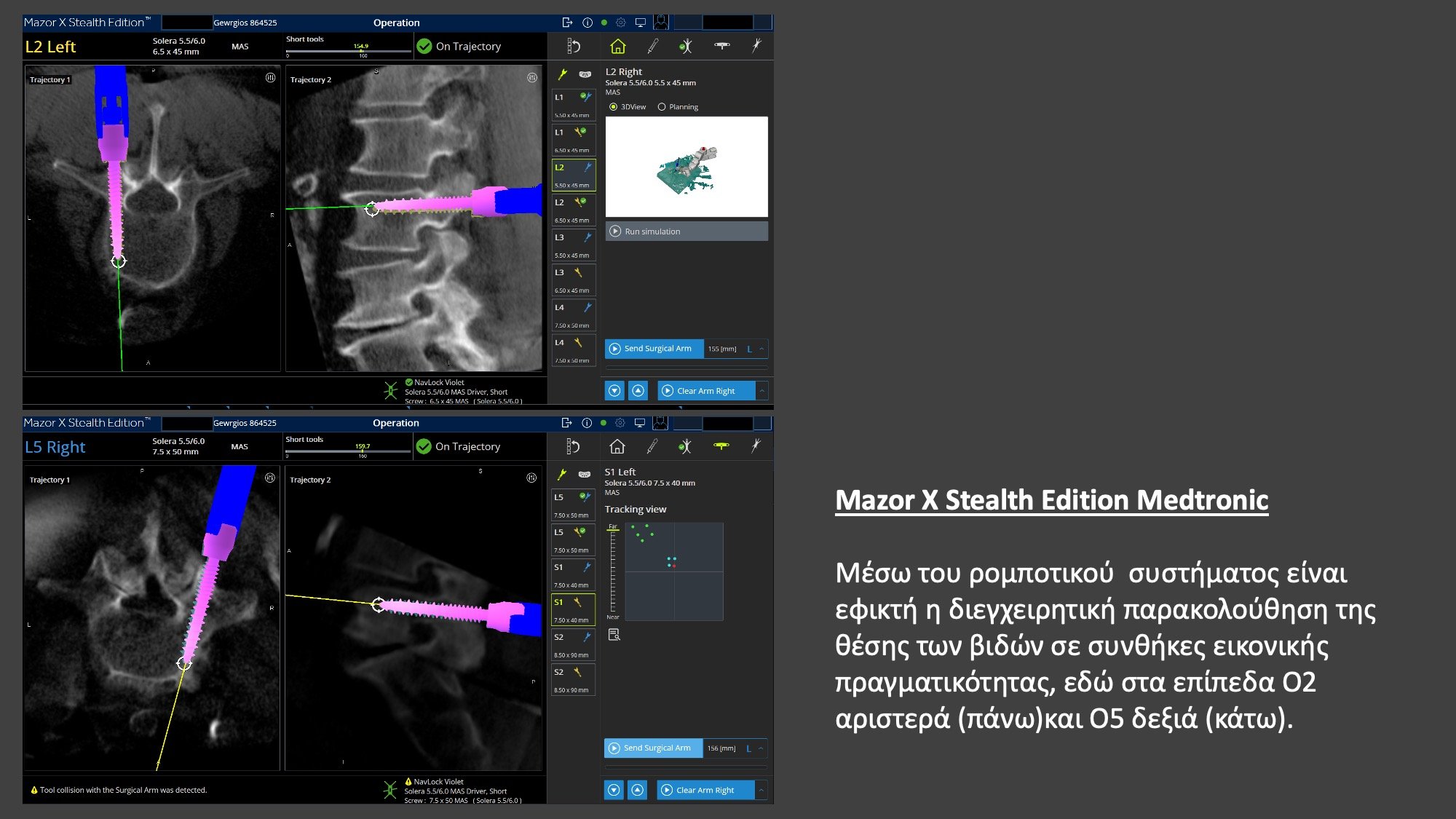
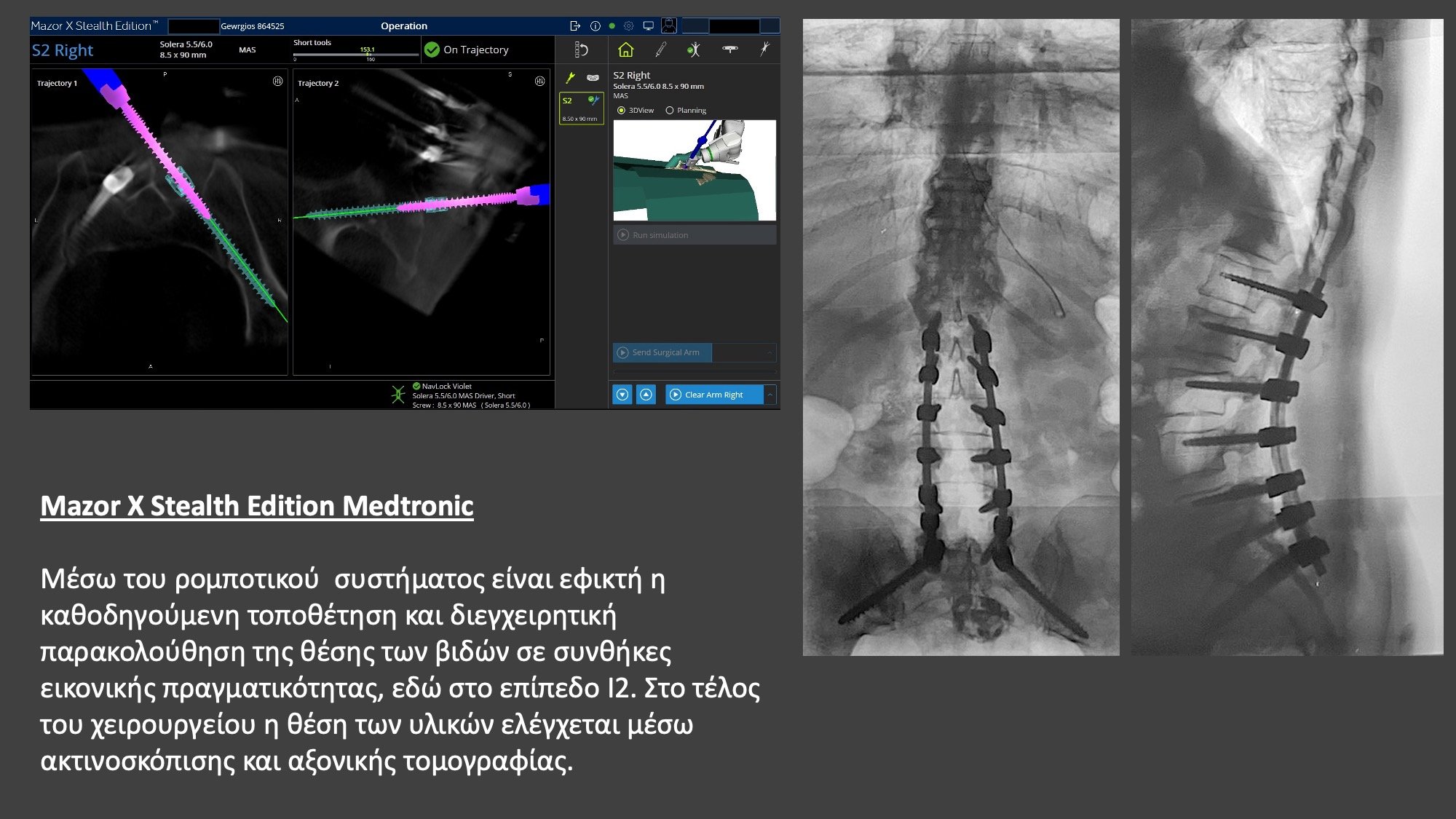
To ρομποτικό σύστημα Mazor X Stealth Edition της εταιρείας MEDTRONIC αποτελεί τεχνολογία, που βοηθά με ακρίβεια και προβλεψιμότητα στις χειρουργικές επεμβάσεις σπονδυλοδεσίας σε οποιαδήποτε μοίρα της σπονδυλικής στήλης. Μέχρι σήμερα έχει εγκατασταθεί μόνο στο νοσοκομείο ΥΓΕΙΑ, παρά το γεγονός ότι διαφημίζεται ευρέως και από άλλα νοσοκομεία ή ιατρούς.
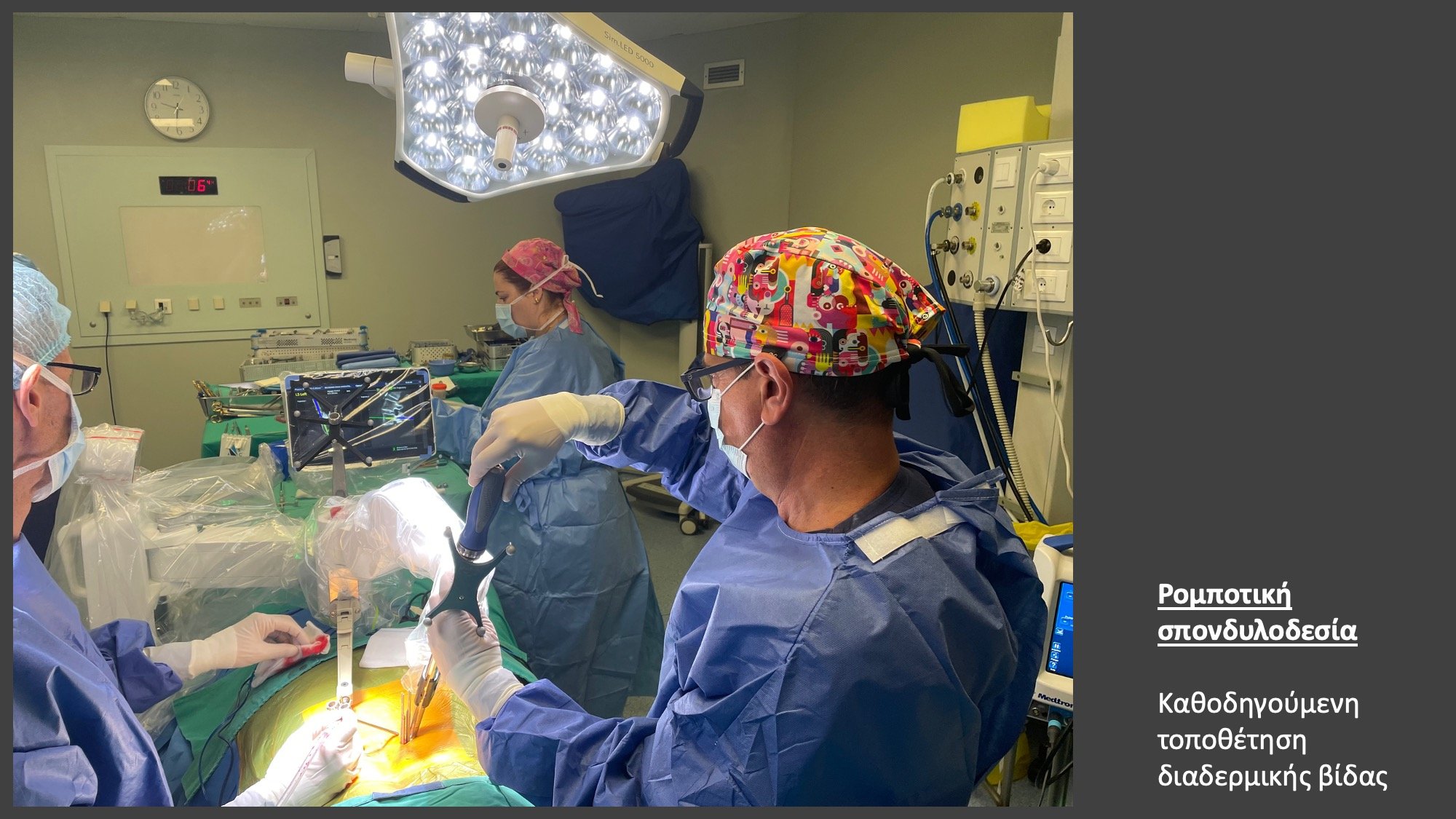
Με το συνδυασμό ενός υπολογιστή και εξειδικευμένου λογισμικού και εργαλείων, οι χειρουργοί χρησιμοποιούν το σύστημα, για να σχεδιάσουν πού και πώς θα χειρουργήσουν τη σπονδυλική στήλη. Στη συνέχεια, ένας αυτοματοποιημένος ρομποτικός «βραχίονας» κρατά ειδικούς αυλούς στη σωστή θέση τους, δηλαδή ευθυγραμμισμένους με τα σημεία επιλογής του σχεδιασμού, ώστε ο χειρουργός μέσω αυτών να προωθήσει με ελάχιστα επεμβατικές τεχνικές τα υλικά του στη σπονδυλική στήλη παρακολουθώντας τη θέση τους σε πραγματικό χρόνο στις οθόνες του συστήματος.
Πριν από την έναρξη του χειρουργείου ο απαραίτητος ακριβής καθορισμός της θέσης της σπονδυλικής στήλης στο χώρο και στο τέλος του χειρουργείου η επαλήθευση της θέσης των υλικών ελέγχονται από το σύστημα διεγχειρητικής απεικόνισης O-ARΜ 2 επίσης της εταιρείας MEDTRONICεντός της χειρουργικής αίθουσας και χωρίς να γίνεται απαραίτητη η παραμικρή αλλαγή θέσης ή μεταφορά του ασθενούς.
Μετά από μια καμπύλη εκμάθησης της διαδικασίας λήψης διεγχειρητικών απεικονίσεων και της χρήσης του ρομπότ, ο χρόνος χειρουργείου είναι σαφώς μικρότερος σε σύγκριση με τις μέχρι τώρα συμβατικές τεχνικές.
Πλεονεκτήματα της τεχνικής της ρομποτικής σπονδυλοδεσίας:
- Σχεδιασμός του χειρουργείου σε συνθήκες εικονικής πραγματικότητας και επιλογή των καταλληλότερων για κάθε περιστατικό υλικών,
- Ακρίβεια της τοποθέτησης των υλικών,
- Ελάχιστα επεμβατική τεχνική (διαδερμική τοποθέτηση των υλικών),
- Μείωση της έκθεσης του ασθενούς και η κατάργηση της έκθεσης του προσωπικού του χειρουργείου στην ακτινοβολία,
- Μικρότερος τραυματισμός των παρασπονδυλίων μυών, μικρότερη απώλεια αίματος, ταχύτερη ανάρρωση, λιγότερος μετεγχειρητικός πόνος,
- Δυνατότητα διεγχειρητικής απεικόνισης της τελικής θέσης των υλικών.



Η ΘΕΣΗ ΤΗΣ ΡΟΜΠΟΤΙΚΗΣ ΣΤΗΝ ΧΕΙΡΟΥΡΓΙΚΗ ΕΓΚΕΦΑΛΟΥ ΚΑΙ ΣΠΟΝΔΥΛΙΚΗΣ ΣΤΗΛΗΣ
Σε αντίθεση με την άποψη του γενικού πληθυσμού σχετικά με την ρομποτική χειρουργική ο ιατρός συνεχίζει να εκτελεί το χειρουργείο σε όλα του τα στάδια και είναι αποκλειστικά υπεύθυνος για αυτό. Τα συστήματα ρομποτικής καθοδήγησης και διεγχειρητικής απεικόνισης τον καθοδηγούν και καθιστούν το χειρουργείο λιγότερο επεμβατικό και περισσότερο ασφαλές για τον ασθενή. Σε καμία περίπτωση δεν έχουν την δυνατότητα αυτόνομης λειτουργίας ή υποκατάστασης τυχούσας έλλειψης γνώσεων ή εμπειρίας του χειρουργού. Είναι όσο καλά, όσο η χειρουργική ομάδα, που τα χρησιμοποιεί. Η χρήση τους δεν είναι χωρίς κινδύνους καθώς η περίπτωση λάθους συνεχίζει να είναι υπαρκτή. Μειώνεται όμως με την κατάλληλη εκπαίδευση των ιατρών και την εμπειρία, που αποκτάται από τη χρήση τους.
Οι μέχρι τώρα χρησιμοποιούμενες τεχνικές λήψης στερεοτακτικών βιοψιών εγκεφάλου ή σπονδυλοδεσίας χωρίς τη χρήση ρομποτικών συστημάτων έχουν επίσης εξελιχθεί κυρίως προς την κατεύθυνση των λιγότερο επεμβατικών τεχνικών και σαφώς συνεχίζουν να θεωρούνται ασφαλείς και αποτελεσματικές. Είναι όμως βέβαιο, ότι στο εγγύς μέλλον τα ρομποτικά συστήματα θα αυξηθούν σε αριθμό, θα εξελιχθούν τεχνικά, θα εξαπλωθούν και τέλος θα γίνουν ένας απαραίτητος χρήσιμος βοηθός του χειρουργού, όπως έχει συμβεί στην νευροχειρουργική παλαιότερα με το χειρουργικό μικροσκόπιο και πιο πρόσφατα με το ενδοσκόπιο και τον νευροπλοηγητή.